【概述】传送带模型的特征是以摩擦力为纽带关联传送带和物体的运动。这类问题涉及滑动摩擦力和静摩擦力的转换、对地位移和二者间相对位移的区别,需要结合牛顿运动定律、运动学公式、功能关系等知识求解。
【关键】
受力分析 | (1)摩擦力方向的判断:①同向“以快带慢”;②反向“互相阻碍”。 (2)共速时摩擦力可能突变:①滑动摩擦力突变为零;②滑动摩擦力突变为静摩擦力;③摩擦力方向突变 |
运动分析 | (1)参考系的选择:①研究物体的速度、位移、加速度时均以地面为参考系;②研究物体的滑行痕迹等一般以传送带为参考系。 (2)判断物体在与传送带达到共速之前是否滑出传送带。 (3)判断共速以后物体是否能与传送带保持相对静止 |
【分类】
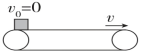
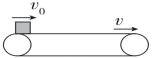
(1)水平传送带
情景 | 滑块的运动情况 | |
传送带不够长 | 传送带足够长 | |
| 一直匀加速 | 先匀加速后匀速 |
|
|
|
|
| |
| 滑块一直匀减速 | 滑块先匀减速到速度为0,后被传送带传回左端:①若 |
 时,一直匀加速
时,一直匀加速 时,先匀加速再匀速
时,先匀加速再匀速 时,一直匀减速
时,一直匀减速 时,先匀减速再匀速
时,先匀减速再匀速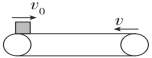
 ,返回到左端时速度大小为
,返回到左端时速度大小为 ;②若
;②若 ,返回到左端时速度大小为
,返回到左端时速度大小为
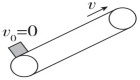
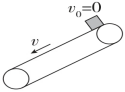
(2)倾斜传送带(倾角为 )
)
情景 | 滑块的运动情况 | |
传送带不够长 | 传送带足够长 | |
| 一直加速(一定满足关系 | 先加速后匀速 |
| 一直加速(加速度为 | 若 |
若 | ||
|
|
|
|
| |
(摩擦力方向一定沿斜面向上) |
| |
|
| |
 )
)
 )
) ,先加速后匀速
,先加速后匀速 ,先以
,先以 加速,后以
加速,后以 加速
加速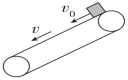
 时,一直加速(加速度为
时,一直加速(加速度为 )
) 时:若
时:若 ,先加速后匀速;若
,先加速后匀速;若 ,先以
,先以 加速,后以
加速,后以 加速
加速 时,一直匀变速
时,一直匀变速 加速度大小为
加速度大小为 时,一直匀速
时,一直匀速
 时:若
时:若 ,先减速后匀速;若
,先减速后匀速;若 ,以
,以 加速,若
加速,若 ,一直匀速
,一直匀速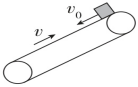
 ,一直加速;
,一直加速; ,一直匀速
,一直匀速 ,一直减速
,一直减速 ,先减速到速度为0后反向加速,若
,先减速到速度为0后反向加速,若 ,则回到原位置时速度大小为
,则回到原位置时速度大小为 ,若
,若 ,则回到原位置时速度大小为
,则回到原位置时速度大小为
1、本网站所提供的信息,只供教育教学参考之用。
2、本网站及其会员一概毋须以任何方式就任何信息传递或传送的失误、不准确或错误对用户或任何其他人士负任何直接或间接的责任。
3、在法律允许的范围内,本网站在此声明,不承担用户或任何人士就使用或未能使用本网站所提供的信息或任何链接或项目所引致的任何直接、间接、附带、从属、特殊、惩罚性或惩戒性的损害赔偿。
4、访问者在从事与本网站相关的所有行为(包括但不限于访问浏览、利用、转载、宣传介绍)时,必须以善意且谨慎的态度行事;访问者不得故意或者过失的损害本网站的各类合法权益,不得利用本网站以任何方式直接或者间接的从事违反中华人民共和国法律、国际公约以及社会公德的行为。对于访问者利用本网站提供的信息而作出的任何决策、决定以及其后果,本网站不承担任何责任
5、本网站图片,文字之类版权,本网站无法鉴别所上传图片或文字的知识版权,如果侵犯,请及时通知我们,本网站将在第一时间及时删除。
6、凡以任何方式登录本网站或直接、间接使用本网站资料者,视为自愿接受本网站声明的约束。
苏州微光