【模型建立】
电磁感应中的“杆 导轨”模型,是导体切割磁感线运动过程中动力学与电磁学知识的综合应用,此类问题是高考命题的重点。
导轨”模型,是导体切割磁感线运动过程中动力学与电磁学知识的综合应用,此类问题是高考命题的重点。
【规律总结】
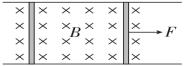
(1)“单杆 导轨”模型
导轨”模型
类型 | 拉力恒定(含电阻) | 拉力恒定(含电容器) |
示意图 |
导轨水平光滑,单杆 |
导轨水平光滑,单杆 |
动力学观点 | 开始时 | 开始时 |
|
|
|
能量观点 |
|
|
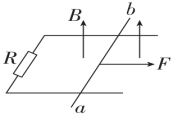
 质量为
质量为 ,电阻不计,两平行导轨间距为
,电阻不计,两平行导轨间距为 ,拉力
,拉力 恒定
恒定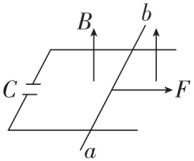
 质量为
质量为 ,电阻不计,两平行导轨间距为
,电阻不计,两平行导轨间距为 ,拉力
,拉力 恒定
恒定 ,杆
,杆 速度
速度 感应电动势
感应电动势 安培力
安培力 ,由
,由 知
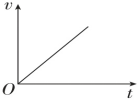
知 ,当
,当 时,
时, 最大,
最大,
 ,杆
,杆 速度
速度 感应电动势
感应电动势 ,经过时间
,经过时间 ,速度为
,速度为 ,此时感应电动势
,此时感应电动势 ,
, 时间内流入电容器的电荷量
时间内流入电容器的电荷量 ,电流
,电流 ,安培力
,安培力 ,
, ,
, ,所以杆以恒定的加速度做匀加速运动
,所以杆以恒定的加速度做匀加速运动 图像
图像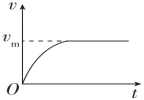
 做的功一部分转化为杆的动能,一部分转化为热量:
做的功一部分转化为杆的动能,一部分转化为热量:
 做的功一部分转化为杆的动能,一部分转化为电场能:
做的功一部分转化为杆的动能,一部分转化为电场能:
(2)“双杆 导轨”模型
导轨”模型
类型 | 光滑平行导轨 | 光滑不等距导轨 | |
示意图 |
两金属杆的质量分别为 |
两金属杆的质量分别为 |
两金属杆的质量分别为 |
动力学观点 | 开始时,两杆做变加速运动;稳定时,两杆以相同的加速度做匀加速运动 | 杆 | 杆 |
动量观点 | 系统动量不守恒 | 系统动量守恒 | 系统动量不守恒 |
能量观点 | 外力做的功 | 杆 | |
 、
、 ,电阻分别为
,电阻分别为 、
、 ,导轨间距为
,导轨间距为 ,其他电阻忽略不计,
,其他电阻忽略不计, 恒定
恒定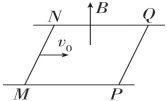
 、
、 ,电阻分别为
,电阻分别为 、
、 ,导轨间距为
,导轨间距为 ,其他电阻忽略不计
,其他电阻忽略不计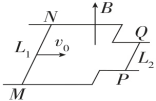
 、
、 ,电阻分别为
,电阻分别为 、
、 ,导轨间距
,导轨间距 ,其他电阻忽略不计
,其他电阻忽略不计 做加速度逐渐减小的减速运动,杆
做加速度逐渐减小的减速运动,杆 做加速度逐渐减小的加速运动,稳定时,两杆的加速度均为零,以相等的速度做匀速运动
做加速度逐渐减小的加速运动,稳定时,两杆的加速度均为零,以相等的速度做匀速运动 做加速度逐渐减小的减速运动,杆
做加速度逐渐减小的减速运动,杆 做加速度逐渐减小的加速运动,稳定时,两杆的加速度均为零,两杆的速度之比
做加速度逐渐减小的加速运动,稳定时,两杆的加速度均为零,两杆的速度之比
 两金属杆增加的动能
两金属杆增加的动能 焦耳热
焦耳热 动能的减少量
动能的减少量 杆
杆 动能的增加量
动能的增加量 焦耳热
焦耳热1、本网站所提供的信息,只供教育教学参考之用。
2、本网站及其会员一概毋须以任何方式就任何信息传递或传送的失误、不准确或错误对用户或任何其他人士负任何直接或间接的责任。
3、在法律允许的范围内,本网站在此声明,不承担用户或任何人士就使用或未能使用本网站所提供的信息或任何链接或项目所引致的任何直接、间接、附带、从属、特殊、惩罚性或惩戒性的损害赔偿。
4、访问者在从事与本网站相关的所有行为(包括但不限于访问浏览、利用、转载、宣传介绍)时,必须以善意且谨慎的态度行事;访问者不得故意或者过失的损害本网站的各类合法权益,不得利用本网站以任何方式直接或者间接的从事违反中华人民共和国法律、国际公约以及社会公德的行为。对于访问者利用本网站提供的信息而作出的任何决策、决定以及其后果,本网站不承担任何责任
5、本网站图片,文字之类版权,本网站无法鉴别所上传图片或文字的知识版权,如果侵犯,请及时通知我们,本网站将在第一时间及时删除。
6、凡以任何方式登录本网站或直接、间接使用本网站资料者,视为自愿接受本网站声明的约束。
苏州微光